Low stress fun on a budget – just leave it in the car

My model flying has gone from a weekly event to an almost daily event thanks to the Hobby King Bonsai. It just stays in my car and is a great little model to just chuck up on spaces like the cricket pitch next to my house – spaces where it would be just impossible or dangerous to fly any of my other models.
I met a couple of guys while camping at the Weston Park Model airshow and one of them, who was heavily influenced by Josh Bixler of Flite Test I think, thrust a transmitter into my hands while he was flying his Bonsai. I loved it immediately and ordered one the next day. Delivery took about 7 weeks but it was well worth it.
So what’s so good about the Bonsai ?
=> At only 24” it sits on the parcel shelf of my car and goes everywhere. My wife loves it – she no longer lives in fear of damaging some precious model as we pack the car. It is almost indestructible and takes up very little space. It also looks cheap so there is no fear of it getting stolen.
=> At only 24” and being a wing you can fly it from a pretty tight space. I have flown it from cricket pitches, football pitches and even my mum’s back garden ( although 2 trees had to be climbed on that last occasion ). I guess this is “park fly” territory but that class of model never existed when I started in the hobby.
=> It is almost indestructible and feels low risk. It has been bounced, cartwheeled and crashed into walls at full speed with very little damage to itself or to others. At 180g ( or less ) and with a pushed prop it has much less potential to cause harm. Superglue works really well to repair it.
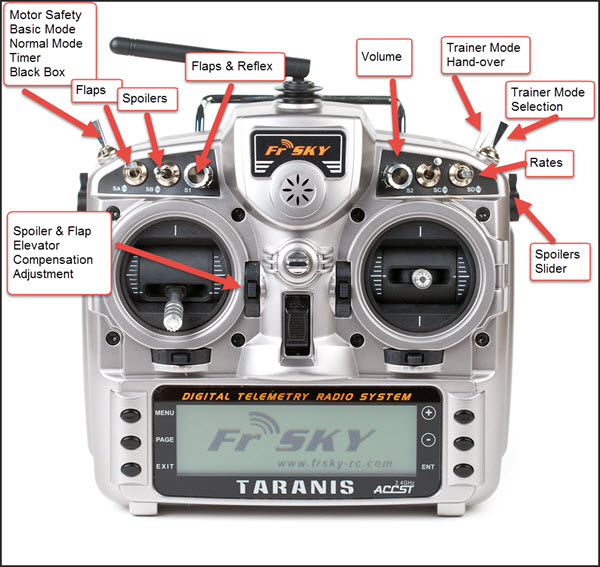
=> It pretty cheap. The wing itself is £14, the motor is £7, 2 servos are £3 each, esc ( Turnigy 10 plush amp ) £6, and the batteries are £4 each. The light weight 4ch receiver for my Taranis was about £15.
=> It’s the first time I have had a model with a prop-saver. They are worth their weight in gold.
=> The manual is surprisingly good for a Hobby King model
=> It is just great, care free fun 🙂
So what are the downsides ?
=> It is not suitable for an absolute beginner. Being a wing it is very easy to become disorientated if the wing ends up inverted – which It can do fairly easily.
=> Being a wing the flight characteristics are a bit different from conventional models but it is pretty robust.
=> Being small it can get blown about a bit. The manual says not to fly when “wind strong enough to make the tees rustle”. This is good if maybe a little over cautious advice. The best fun I had with it was flying it off the top of a mountain in a very strong breeze that required full throttle just to stay still. It was an absolute blast.
=> The quoted stock motor ( 1612 ) does not seem to be available. I used an 1811 2900kv motor which works well. The size of prop is pretty much limited by the design ( unless you mod it ) so you need to find a motor that will do 3000 kvm on a 2s or 2000 kvm on a 3s. I was wary of needing to stock 2s batteries but tbh they are so cheap that it is not a problem. The connectors on these models also tend to be smaller jst form factor.
=> I had to disassemble one of the HK 3g servos and fix it when it jammed after 30 seconds. I would highly recommend using a servo tester to stress test the servos before use.
=> There were no self tapping screws included with the wing or the motor
Other useful stuff
=> I used extreme packing tape on the leading edge to make it a bit more durable
=> I used the same tape to cover the esc and receiver
=> I added 2 carbon rods to the nose to stiffen the nose up a bit after the first few crashes.
=> I also used an 800mah battery instead of the suggested 500 mah unit. This meant that I had to fit 20g of lead to the motor mount to get the balance right. In hind sight I would go for either the 1811 motor with a 500mah battery or a larger motor and the 800 mah battery.
=> Don’t forget to order some JST battery pigtails leads to connect the esc to the battery.
=> Don’t forget to order spare props and prop saver bands – possibly these
The Verdict
Would I buy one again ? I already have and it is sitting there in its box for when this one dies 🙂













{kind=link}